Apparatuur voor CCD-astrofotografie, T. Scholten
BESCHRIJVING:
Alle hier besproken apparatuur is zelfbouw. Onderstaande beelden geven een overzicht van de apparatuur waarvan de diverse
onderdelen hier nader zullen worden beschreven. De gehele opstelling is demontabel en daarmee mobiel. Klik op de miniaturen
voor een volledig beeld.
Ik beschik momenteel over drie formaten Newton telescopen: 11cm f/D=4.6 als volgkijker, 15cm f/D=6.3
en 25cm f/D=5.7 voor visuele waarneming en fotografie. Het boek van J. Texereau (How to Make a Telescope) is een aan te
bevelen richtlijn bij de vervaardiging van de spiegels. De telescoopbuizen zijn van PVC. Op de plaats van de focuseer-inrichting
zit bij elke telescoop een zelfde montagevlak waarop enkele uitvoeringsvormen van de focuseerinrichting
passen.
De vangspiegel van de 25cm Newton is eenvoudig en snel verwisselbaar: Voor het volledig belichten van de 12x24mm FFT1020 chip
is een 70mm doorsnede spiegel nodig; voor het overige werk een 50mm doorsnede spiegel. Na vervanging kunnen met een
lasercollimator de vangspiegel en telescoop snel worden uitgelijnd.
TERUG
HET STATIEF |
|
 |
|
 |
Het statief is van hout en bestaat uit een centrale zuil (10x10cm) voorzien van drie schragen. Op het statief bevinden zich
de montering, een waterpas en de aansturingselektronica voor de montering.
Een van de poten is instelbaar en voorzien van een schaalverdeling. Hiermee is het mogelijk om het statief op verschillende
posities in mijn tuin te plaatsen (op een stenen ondergrond). Die posities zijn voorzien van een kuiltje waarin de instelbare
poot valt en op een bekende hoogte kan worden ingesteld en van een markering waar een van de twee andere poten moet staan.
TERUG
Het wormwiel is op een draaibank gemaakt: Met een M12-tap in de klauwplaat en door het (worm)wiel vrij draaiend hier tegen aan
te drukken, wordt het wormpatroon erin gesneden. De worm zelf is een gelagerd stuk M12 draadstang welke met een veer tegen het
wormwiel wordt aangedrukt. Zoals met elk wormwiel is er een periodieke afwijking aanwezig welke met behulp van de
volgkijker automatisch wordt gecompenseerd. De worm wordt via een tandwieloverbrenging aangedreven
met een 220V synchroonmotor welke met een kristalgestuurde oscillator wordt aangestuurd. De
motoraandrijving kan worden losgekoppeld zodat ook met de hand de uuras kan worden ingesteld.
De declinatie-as kan met de hand, via een micrometer, of met een DC-motor (welke op dezelfde micrometer aangrijpt) worden
ingesteld. Door de lange arm wordt een hoge
nauwkeurigheid verkregen. De assen zelf zijn als volgt opgebouwd: Uuras 30mm; opgehangen in twee standaard lagers welke in
een stalen buis zijn gevat. Declinatie-as en lagerhuis zijn afkomstig van een oude draaibank. De 40mm dikke as is verlengd
met een 22mm as waarop de contragewichten en de volgkijker kunnen worden geschoven.
Het draaipunt tussen declinatie-as en uuras is voorzien van een 'druklager' bestaande uit een krans van 4mm kogeltjes rond
de uuras welke met een kleine metalen ring op de plaats worden gehouden.
TERUG
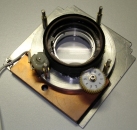
Twee typen focuseerinrichtingen worden gebruikt. Die in de eerste opname is gemaakt van een oud camera-objectief waaruit alle
optiek is verwijderd en een 1.25" bus is aangebracht. Een 'hendel' en genummerde schaalverdeling vereenvoudigen het focuseren.
Een vaantje op de as van een kleine DC-motor fungeert als shutter. Dit model is geschikt voor FullFrame opnamen van de
FFT1020 CCD.
De inrichting in het tweede beeld gebruikt een kleine translatietafel voor focusering, waaraan een 1.25" bus is gemonteerd.
Onder deze bus (in de platte afgeschermde ruimte) bevinden zich een filterwiel met vier posities (Filters: Geel, Magenta,
Cyaan, en 'Geen') en een identieke shutter als bij het eerste model. Het filter wordt met de hand bediend. Deze inrichting is
geschikt voor de FT800P CCD en (door de beperkte opening in het filterwiel) de FFT1020 in FrameTranfer mode (waarbij de helft
van de chip wordt gebruikt).
De overige foto's laten de opstellingen zien (met de FFT1020 camera) die gebruikt worden voor oculair-projectie (opgebouwd
met het tweede model focuseerinrichting) en barlow-projectie (het laatste beeld).
TERUG
Het wormwiel vertoont een aanzienlijke slingering (~0.5') waardoor, als niet actief gevolgt wordt, reeds bij relatief korte
opnamen volgfouten optreden. Actief volgen wordt bereikt met de 11cm Newton volgkijker met een dubbel-fotodiode sensor, voorzien
van een 'barlow lens' (een sterk negatieve lens uit een gesloopt camera-objectief). De volgkijker bevindt zich als deel van
het contra-gewicht aan de andere zijde van de declinatie-as. De barlow lens zorg voor aanzienlijke verlenging van de
brandpuntsafstand van de 11cm kijker.
Een volgster wordt op de overgang tussen de dubbeldiode geplaatst (Afmetingen dubbeldiode: 0.5x1mm per stuk). Een volgster met
een magnitude kleiner of gelijk aan +2 is nodig.
Met de ster precies tussen de dioden in, is het verschilsignaal nul; bij een uuras-afwijking is het verschilsignaal positief
of negatief. Dit verschilsignaal wordt met een Voltage Controlled Oscillator omgezet in een frequentie waarmee de synchroonmotor van
de uuras wordt aangedreven. (Voor details zie de elektronische aansturing en de principe-schets rechtsboven.
Om de volgster vrij te kunnen selecteren kan de volgkijker om twee assen ingesteld worden terwijl deze op de declinatie-as
geklemd blijft. Verder kan het geheel van barlow-lens+dubbel-diode met een XY-instelling door het focusvlak worden bewogen.
Voordat de dubbel-diodekop wordt geplaatst, wordt met een klein oculair de volgster in het midden gepositioneerd.
Volgfouten ontstaan ook door speling van de hoofdspiegel van hoofd- en volgkijker in de spiegelbak en speling in de
focuseerinrichtingen. Daarom kunnen de hoofdspiegels middels een nijlon bout aan de zijkant van de PVC-buis worden geborgd
en worden barlow-lens/dubbeldiode en ook de CCD-camera stevig geborgd.
TERUG
DE ELEKTRONISCHE AANSTURING |
|
 |
|
 |
|
 |
|
De elektronica voor de montering is in een kast ondergebracht en aan het statief bevestigd. De elektronica omvat een
230VAC->12VDC voeding (waardoor ook een 12V accu-voeding mogelijk is), de kristaloscillator, de 12V->230VAC driver voor de
synchroonmotor, de links/rechtsom driver voor de DC-motor voor de declinatie-as, de voeding voor LED's welke de verdelingen
en waterpas verlichten en de regelbare voeding voor een oculairverlichting.
Op dit kastje wordt de dubbel-diode kop van de volgkijker aangesloten en/of een handbedieningskastje
waarmee beide assen digitaal bestuurbaar zijn (d.w.z. uuras: nominaal, sneller, langzamer; declinatie-as: onbekrachtigd, up,
down).
TERUG
Hart van deze camera vormt de Philips FT800P frame-transfer chip welke bestaat uit een 6.4x4.8mm gevoelig oppervlak met
734x580 beeldelementen (pixels) en een even groot, afgeschermd oppervlak voor opslag van het beeld tijdens de uitleescyclus.
De zogenaamde interlacing techniek wordt niet gebruikt waardoor het aantal lijnen van 580 reduceert tot 290 lijnen van 16.8um
hoogte. De breedte van de pixels is 8.5um. Nadat het beeld met de computer is ingelezen wordt deze in horizontale richting
gebinned (d.w.z. twee horizontale pixels samengevoegd) waardoor een effectieve pixelbreedte van 17um resulteert.
Voor koeling is de chip via een metalen blok op een peltierelement geklemd en is het geheel met goed isolerend schuim ingepakt.
Om de warmte van de achterzijde van het peltierelement af te voeren is het huis uitgerust met de nodige koelvinnen. De ruimte
waarin zich de chip bevindt is hermetisch gesloten. Als venster is een fotografisch UV-filter met AR-coating gebruikt.
In een externe kast bevinden zich de voedingen voor de camera en het peltierelement en de AD-omzetter/IO-elektronica welke
via de printerpoort in verbinding staan met de computer.
TERUG
FFT1020 KLEUREN CCD CAMERA |
|
 |
|
 |
|
 |
|
 |
|
Deze camera bevat de FFT1020 full frame chip met 1024x2048 pixels van 12umx12um. Op het oppervlak van de chip is een rood,
groen, blauw filter aangebracht in een zogenaamd Bayer-patroon (oneven lijnen: RGRGRG...; even lijnen GBGBGBGB....). De chip
omvat daarmee 512x1024 kleuren pixels van 24x24um. Net als bij de FT800P is de CCD via een metalen blok op een peltierelement
gemonteerd en is het geheel geisoleerd en hermetisch afgesloten. Ook hier wordt de door het peltierelement geproduceerde warmte
via koelvinnen afgevoerd.
Bij het maken van kleurenopnamen wordt extern een zogenaamd warmtereflecterend filter gebruikt om een juiste kleurenbalans
te garanderen. Dit filter blokkeert infra-rood golflengtes langer dan 700nm.
In vergelijking met de FT800P camera zijn een aantal voor- en nadelen van gebruik van deze kleurenchip op te sommen:
- In geval van fotografie van planeten en de maan heeft de kleuren-CCD het grote voordeel dat instantaan een kleurenbeeld
wordt verkregen. Bij luchtonrust is een enkel moment van goede seeing voldoende om een goede opname te verkrijgen. Verder vormt
het na elkaar opnemen van afzonderlijke RGB-beelden bij met name een snel roterende planeet als Jupiter een probleem doordat
RGB-beelden met enkele minuten tussenruimte niet meer goed overlappen. De kleuren-chip kent dit probleem niet.
- Door het formaat van de chip is het vinden van objecten eenvoudiger en kunnen grote objecten met hoge resolutie worden
gefotografeerd.
- Door het RGB-filter is de gevoeligheid lager. Dit wordt deels gecompenseerd door het feit dat voor een kleurenopname met
een filterwiel drie opnamen nodig zijn. In diezelde opnametijd komt de FFT1020 tot vrijwel hetzelfde kleurensignaalniveau.
- H-alpha objecten zijn niet zinvol met de FFT1020 te fotograferen: Bij gebruik van een H-alpha filter is slechts een deel
van het chipoppervlak actief. De FT800P is hier in het voordeel.
- Gebruik van bijdragen in het 700-1000nm bereik leiden tot een niet corrigeerbare onbalans in de kleuren doordat
het B- en G-filter transparant worden in het infra-rood.
TERUG
FTT1010 EN FTF2020
MONOCHROOM CCD CAMERA |
|
 |
|
 |
|
 |
|
 |
|
 |
|
Na enig tijd met de FT1020-C camera te hebben gewerkt zijn toch een aantal nadelen van een kleurenchip naar voren gekomen:
- De gevoeligheid is toereikend voor maan, planeten en heldere nevels als de orionnevel, de halternevel of de ringnevel.
Voor sterrenstelsels is de gevoeligheid net iets te laag en zijn lange belichtingstijden nodig (som over 1 uur belichten),
waarbij nog aanzienlijke ruis in het beeld overblijft.
- Bij gebruik van een H-alfa filter of een kleurfilter, met als doel om een beter contrast te verkrijgen of om strooilicht
te onderdrukken, is de gevoeligheid extra laag en wordt slechts een deel van de pixels gebruikt.
- Scherp afgebeelde sterren activeren alleen een van de drie kleurpixels waardoor (bijvoorbeeld bij fotografie van een
sterrenhoop) de sterren onnatuurlijke kleuren krijgen.
De FTT1010-M en FTF2020-M monochroom CCDs hebben bovenstaande nadelen niet en hebben verder de volgende voordelen:
- De gevoeligheid van het chip-oppervlak is een factor 6-8 groter.
- Bij gebruik van MYC-filters wordt efficienter met licht omgegaan dan met de on-chip RGB-filters. Ook is een beterekleur
definitie te bereiken.
De FTT1010-M en FTF2020-M camera's zijn functioneel identiek aan de FT1020-C camera. De opbouw is echter gemodificeerd om een betere
koeling van de chip mogelijk te maken. Het peltier-element is (net als bij de Audine) gemonteerd op een flinke koelvin welke voorzien
is van een ventilator. Het peltier-element is een kleiner en efficienter exemplaar (Melcor 30x30mm).
TERUG
CAMERA ELECTRONICA EN AD-OMZETTER |
|
|
|
 |
|
De elektronica van beide camera's heeft dezelfde functionele opbouw. Direct bij de CCD-chip bevinden zich de drivers voor de
aansturing van de vertikale schuifregisters (A en B gates) en het horizontale register (C-gate). Met deze gates wordt de op
de chip verzamelde lading lijn-voor-lijn (A,B) en pixel-voor-pixel (C) naar een on-chip lading-naar-spanningsomzetter gevoerd.
Direct bij de chip bevindt zich ook een emittervolger voor het bufferen en daarmee beschermen van de gevoelige uitgang van
de CCD.
Het board in de behuizing van de camera bevat voornamelijk digitale elektronica met de volgende functies:
- CLEAR:
Houdt alle gates laag waardoor lading van de CCD wegvloeit en deze wordt schoon geveegd.
- READ:
FT800P en FFT1020 in Frame Transfer mode: Schuif de geintegreerde lading van het lichtgevoelige deel snel (~3msec) naar
het afgeschermde gedeelte van de chip waarna de lading in lager tempo kan worden uitgelezen. (Bij de FT800P bevindt de licht
afscherming zich op de chip; bij de FFT1020 is deze desgewenst extern aangebracht).
FTF1020-C en FTF2020-M in Full Frame mode: Start de
uitleescyclus waarbij lijn-voor-lijn en pixel-voor-pixel wordt uitgelezen (pixel clock: 333kHz).
- BINNING (niet voor de FT800P):
On-chip binning (d.w.z. samenvoegen) van groepjes van 4 pixels tot 1 pixel, resulterend in een
zwart/wit beeld van 512x1024 pixels van 24x24um.
- SAMPLE:
Deze output bevat de pixel-clock voor synchronisatie van de AD-conversie. Bij de FT800P is de snelheid 38usec per pixel
bij de (nieuwere) FTF1020, FTT1010 en FTF2020 3usec.
Een klein deel van het camera-board bevat de analoge elektronica voor verwerking van het videosignaal. Dit deel bestaat
uit een ac-gekoppelde 10x versterker en een sample-and-hold circuit welke gebruik maakt van Correlated Double Sampling.
Beschrijving van de AD-converter:
Het videosignaal van de camera gaat naar een 12-bits (0..4096) analoog-naar-digitaal omzetter. Voor de FT800P camera is de
AD-converter samen met I/O voor de digitale functies in een aparte behuizing ondergebracht, samen met de voeding voor de camera
en het peltierelement. Data-overdracht en aansturing geschiedt daarbij via de printerpoort van de computer.
Bij de FFT1020 is de AD-converter en digitale I/O in de computer ondergebracht en verloopt data-overdracht direct via de
ISA-bus van de 133MHz Pentium PC.
TERUG
4- EN 7-POSITIES KLEURENFILTERWIEL |
|
 |
|
 |
|
 |
|
 |
|
Het eerste kleurenfilterwiel beschikt over 4 posities waarvan drie worden gebruikt door een Rood, Groen en Blauw filterset (Edmund Optics).
De vierde is nog vrij. Bij gebruik van het filterwiel wordt voor de CCD-camera nog een infra-rood blokkeringsfilter geplaatst. Bij de 25cm Newton zit dit
filter tussen vangspiegel en oculairhouder en is eenvoudig in en uit het lichtpad te schuiven zodat na RGB-opnamen met IR-filter eenvoudig een L-opname (Luminantie)
kan worden gemaakt zonder IR-filter.
I.v.m. het grote oppervlak van de FTF2020 (diagonaal bijna 35mm) zijn de filters 50mm doorsnede.
Het filterwiel is plat en voegt slechts 4mm extra weglengte toe. In de schematische tekening is in doorsnede de opbouw zichtbaar.
Ik heb onlangs een tweede filterwiel gebouwd met 7 posties voor R,G,B, SII, H-alfa en OIII filters en met één open positie.
De aandrijving is eenvoudig gehouden: Een DC-motortje en aandrukrol uit een recorder draaien de schijf rond. Met een micro-switch
die in een inkeping van het filterwiel valt wordt de stroom naar de motor onderbroken en stopt de rotatie. De vier inkepingen zijn in bovenstaande
foto niet zichtbaar omdat deze zich langs de rand in het ondervlak van het wiel bevinden. Door met een externe schakelaar
(transistor) de micro-switch kortstondig te overbruggen begint de rotatie, komt de micro-switch uit de inkeping en krijgt de motor stroom tot
de volgende inkeping.
Van belang is dat de microswitch de stroomtoevoer naar de motor niet alleen onderbreekt maar gelijktijdig de contacten van de motor via een
laag-ohmige verbinding kortsluit zodat deze snel tot stilstand komt. Dit om te voorkomen dat door traagheid de motor doorloopt en de
microswitch uit de inkeping los komt en weer stroom toelevert. Het wiel blijft dan doordraaien.
TERUG
EENVOUDIGE COMA-CORRECTOR EN FOCAL REDUCER VOOR H-ALFA |
|
 |
|
 |
|
 |
|
 |
|
Bij gebruik van een H-alfa filter (656nm, 10nm bandbreedte) wordt slechts één kleur gebruikt en is de chromatische aberratie van een lens verwaarloosbaar. Door toevoeging
van een eenvoudige plano-convex lens kan daarom op eenvoudige wijze de coma verminderd worden en bovendien het beeldveld en de gevoeligheid worden vergroot.
Het eerste figuur toont een uitsnede van de lay-out rond de vangspiegel en het primaire focus van de f=1455mm, f/D=5.7 Newton
telescoop. De CCD-chip bevindt zich in het primaire brandpunt met daarvoor nog het venster van de CCD-camera en het H-alfa filter (Edmund Optics). Het
tweede figuur geeft dezelfde uitsnede, nu met de als coma corrector en focal reducer fungerende plano-convex lens. In
dit geval betreft het een Edmund Optics lens van BK-7 met een brandpuntsafstand van 250mm (45154). Lens en positie van de lens zijn met Zemax geoptimaliseerd
binnen de geldende mechanische randvoorwaarden.
Het resultaat is een halvering van de spotdiameter aan de beeldrand en een verhoging van de gevoeligheid van f/D=5.7 naar f/D=4.7 (ofwel een factor 1.5 in gevoeligheid).
Het beeldveld bij gebruik van de FTF2020M 2048x2048 CCD (24.5x24.5mm) wordt vergroot
van 0.96°x0.96° naar 1.14°x1.14°.
Het figuur rechts geeft de ray-tracing resultaten (spotvormen) van de configuraties met en
zonder 'corrector' -lens. Het zwarte cirkeltje in de spotdiagrammen is de Airy-disk. Spot 4 bevindt zich op de uiterste hoekpunt van de CCD.
TERUG
SOFTWARE VOOR BEELDBEWERKING |
Software voor verwerking van de CCD-beelden is geschreven in MicroSoft Visual C++. Over het algemeen worden twee
beelden (A en B genoemd) gebruikt waarbij het mogelijk is om A te filteren resulterend in B, of rekenkundige
bewerkingen uit te voeren gebruik makend van A en B. Ook kunnen R,G,B beelden geselecteerd worden voor een kleurenbeeld waarbij A of B als
Luminatie component (Y-beeld) kan fungeren.
Onderstaande figuur geeft een (deel van een) screendump met het help-venster getoond. Daarin staan de belangrijkste functies en instructies

TERUG















































